Fast Deep Stereo with 2D Convolutional Processing of Cost Signatures
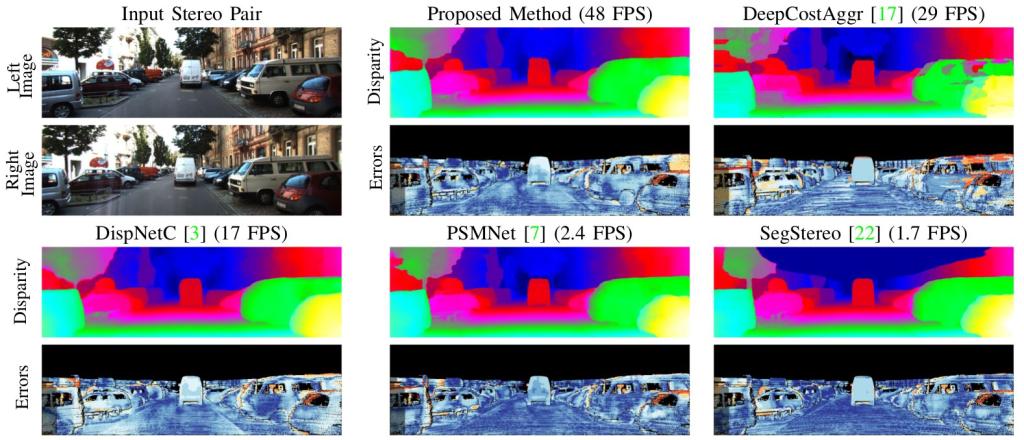
Modern neural network-based algorithms are able to produce highly accurate depth estimates from stereo image pairs, nearly matching the reliability of measurements from more expensive depth sensors. However, this accuracy comes with a higher computational cost since these methods use network architectures designed to compute and process matching scores across all candidate matches at all locations, with floating point computations repeated across a match volume with dimensions corresponding to both space and disparity. This leads to longer running times to process each image pair, making them impractical for real-time use in robots and autonomous vehicles. We propose a new stereo algorithm that employs a significantly more efficient network architecture. Our method builds an initial match cost volume using traditional matching costs that are fast to compute, and trains a network to estimate disparity from this volume. Crucially, our network only employs per-pixel and two-dimensional convolution operations: to summarize the match information at each location as a low-dimensional feature vector, and to spatially process these "cost-signature" features to produce a dense disparity map. Experimental results on the KITTI benchmark show that our method delivers competitive accuracy at significantly higher speeds—running at 48 frames per second on a modern GPU. [Overview Video]
| Publication | [WACV 2020] |
| Source Code | [GitHub] |
This work was supported by the National Science Foundation under grant no. IIS-1820693. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors, and do not necessarily reflect the views of the National Science Foundation.
This site uses Google Analytics for visitor stats, which collects and processes visitor data and sets/reads cookies as described here.